
Automat balansujący ołówkiem
Wśród najtrudniejszych zagadnień informatyki i robotyki prym wiodą balansowanie - utrzymywanie równowagi i przetwarzanie obrazu z wydobywaniem z niego istotnych informacji. Wiele dekad zajęło konstruktorom skonstruowanie robota, który potrafiłby iść, nie mówiąc już o bieganiu. Z kolei „rozumienie" obrazu, który zwykle zawiera mnóstwo nadmiarowej i zbędnej informacji, trudnej zwykle do odseparowania, wymaga bardzo dużej mocy obliczeniowej i wymyślnych algorytmów. Połączenie tych dwóch zagadnień, czyli utrzymywanie równowagi na podstawie danych wizualnych urasta przy tym do rangi superproblemu, choć przecież nawet proste biologiczne organizmy potrafią to robić całkowicie intuicyjnie.
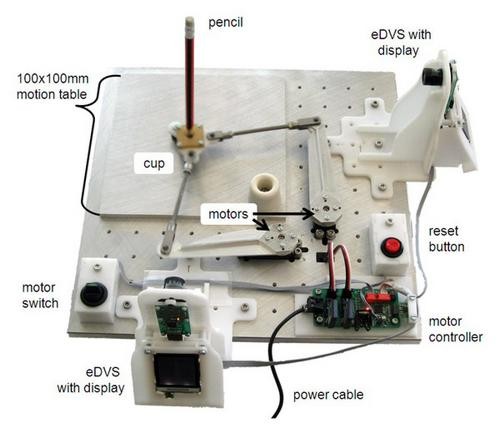
O ile balansowanie dużym kijem jest dla zaawansowanych konstrukcji wykonalne, o tyle zrobienie tego samego w mniejszej skali niedawno było nierealne. Bo przecież, choć balansować kijem od szczotki może nauczyć się każdy, to balansowanie ołówkiem nawet dla człowieka jest trudniejsze. Trzej inżynierowie z Instytutu Neuroinformatyki na University Zurich: Jorg Conradt, Tobi Delbruck i Matthew Cook, dokonali przełomu, konstruując automat potrafiący dowolnie długo balansować zwykłym ołówkiem, korzystając jedynie z obrazu z dwóch prostopadłych kamer:
Jak można się przekonać, nie przeszkadza mu nawet zmieniające się tło za ołówkiem i bez problemu radzi on sobie z odfiltrowaniem tego, co potrzeba:
Wbrew temu, co można by myśleć, kluczem do sukcesu nie jest superszybki komputer ukryty pod stołem. Zamiast szukać skutecznego algorytmu autorzy pomysłu zastosowali sprytny trik: kamery, obserwujące ołówek nie rejestrują pełnej informacji o obrazie, ale jedynie jego zmiany. Kamera, nazwana przez nich krzemową siatkówką, złożona jest z fotoczułych elementów, które reagują na zmiany jasności. W rezultacie każdy piksel reprezentuje już przefiltrowaną informację o zmianach zachodzących przed okiem kamery. Odpowiednie algorytmy już bez trudu wyławiają z nich położenie i kąt nachylenia ołówka, a odpowiednio szybkie serwomotory korygują jego położenie. Inspiracją dla rozwiązania były biologiczne sieci neuronowe.

Komentarze (16)
IrQ, 22 stycznia 2011, 08:44
"Wśród najtrudniejszych zagadnień informatyki i robotyki prym wiodą balansowanie - utrzymywanie równowagi"
To raczej teria sterowania, czyli jedna z dziedzin automatyki i nazywa się to po prostu regulacją, jest wielkość którą należy utrzymać na danym poziomie, w tym momencie są to dwa kąty. podobne zadanie realizowane jest od wielu lat na każdej uczelni świata, polega na utrzymywaniu równowagi co prawda w jednej osi ale zasada jest taka sama, nazywamy to wahadłem odwróconym (inverted pandulum) i wcale nie jest długości kija od miotły.
dodatkowo w wahadle pozycja jest utzymywana na tyle stabinie że można na końcówce wahadła filiżankę z kawą postawić i ją utrzyma w centrum osi, tutaj ołówek jeździ po całej platformie i praktycznie nigdy nie jest w pionie. ale z drugiej strony zadanie tutaj jest utrudnione.
"Inspiracją dla rozwiązania były biologiczne sieci neuronowe." czyli w skrócie znany od wielu lat regulator rozmyty neuronowy. polega to na tym że sam się dostraja na podstawie swoich błędów.
Troszkę się podłamałem jakie triki stosują autorzy tekstów. wszystko ubrane jest w takie słowa, że wydaje się rewolucją na skalę światową, a tutaj mamy rozwiązanie starego problemu (nieco utrudnionego) do którego użytych starych algorytmów i nowoczesnych metod.
WIOO, 22 stycznia 2011, 11:09
Ja się trochę podłamałem czytając następną demotywującą osobę.
Uważam że autorzy tekstów idealnie zaszczepić pasję nauki i innowacji. Jakby pisali twoim jeżykiem to nikt by nie czytał koplaniawiedzy.pl
Wraz z kolegą składamy naszego własnego robota i ten artykuł był dla mnie jak mała rewolucja.
Coraz więcej osób zaczyna dostrzegać że proste rozwiązania są najlepsze, czasami jedynie trzeba zaliczyć te złożone.
IrQ, 22 stycznia 2011, 11:55
Czy ja kogoś demotywuje? wskazuje tylko że nie ma tu nic innowacyjnego.
Zgadzam się z Tobą że nikt bynie czytałbo to populatnonaukowy portal, jednak to co tu napisane nie ukazuje całej prawdy i faktycznego stanu wiedzy...od wielu lat po lotniskach czy innych obiektach poruszają się ludzie na wózkach wykorzystujących zasadze regulacji wahadła odwrotnego. Artykuł ciekawy, jednak czepiam się samego ujęcia tematu jako wielkiej rewolucji...To tak jakby ktoś rozwinął przybliżenie liczby pi do kolejnego miejsca po przecinku, to coś nowego ale nie rewolucyjnego, chyba że zastosowanoby do tego nowych metod a metody opisane tutaj są znane od dawna, projekt na studiach który wykonałem sam w praktyce to właśnie wahadło odwrotne, a to tylko projekt, na dyplomie miałem włąśnie sterowanie rozmyte suwnicą 3D, też w praktyce i nie uważam tego za rewolucje. Życzę powodzeniu w budowaniu robota. I troche mnie ciekawi czy robot ma być o podobnej zasadzie działania. jeśli tak to mam kilka pomysłów jak uprościć to co wykonali autorzy regulatora pionu ołówka.
IrQ, 22 stycznia 2011, 12:03
tutaj mamy praktyczne wykorzystanie tej zasady, filmik sprzed 3 lat. tutaj nie ma wielkiego komputera pod stolikiem, jest zoptymalizowany algorytm mieszczący się na konstrukcji która się porusza.
Moim zdaniem pierwszy taki robot był rewolucyjny, pierwsze systemy pionowego staru (rakiety z IIWŚ) to były rewolucje a nie balastowanie ołówkiem.
tutaj kolejny bardzo ciekawy przykłąd regulacji, moim zdaniem znacznie ciekawszy niż ołówek,
tutaj możemy zakłócać regulacje a ołówka prawie nie można dotknąć, przynajmniej nie zaprezentowano tego, zmieniano niby tło na 2 filmiku w artykule, ale z jaką prędkością? to nie są realne zakłócenia a automatyka czy robotyka ma się przydawać i działąć w realnym świecie. a ten ołówek to co w biurze sobie postawie?
Przepraszam za mój język, może nie jest jasny do końca i dla każdego ale prawda jest taka że nie widzę tu nic nowego, pozdrawiam
whiteresource, 22 stycznia 2011, 12:08
Popieram kolegę. Niestety istnieje pewna delikatna granica pomiędzy tymi, którzy po prostu tworzą a tymi, którzy czyhają nad nimi i wbijają szpilę w tyłek. Choć nie przeczę, że pewna krytyka... też musi istnieć
waldi888231200, 22 stycznia 2011, 12:09
Wszyscy fascynują się utrzymywaniem ołówka w równowadze, a przciez automatyka utrzymuje tysiące procesów w równowadze , elektronika równiez (stabilność obrazu na twoim monitorze to równiez wynik równowagi ) , przyroda robi to od tysięcy lat, co więc fascynującego w stojącym ołówku ?? nic. Ale miło się ogląda.
IrQ, 22 stycznia 2011, 12:19
Jeśli myślisz że ja nic nie robie i tylko krytykuje to się mylisz, na studiach zrobiłem kilka praktycznych projektów, praca dplomowa okazała się wystarczająco dobra by mój promotor na jej podstawie zrobił habilitację, ale nie chwale się tylko bronie przed Twoim oskarżeniem, dodatkowo pracuje aktywnie w zawodzie wiec nie mów o mnie że nic nie robię i tylko w tyłek szpilkę wbijam. Wszystko ok, cały artykuł, sposób rozwiązania, nikogo nie chce urazić ani zdemotywować, chce tylko aby wszyscy byli świadomi że nie ma w tym nic nowego, zupełnie nic. a tak jak kolega wyżej zauważył tysiące podobnych procesów jest stale regulowane.
wilk, 22 stycznia 2011, 12:53
Niewątpliwie ciekawe urządzenie, ale szkoda, że nie doprowadza w ogóle do punktu równowagi, a jedynie nieustannie balansuje tym ołówkiem niwelując każde odchylenie.
maciejo, 22 stycznia 2011, 20:43
zgadzam się z IrQ, żadna z tego rewelacja, Do tego myślę że wielu studentów z kierunku automatyki i robotyki takie coś bez problemu mogłogłoby zrobić gdyby im się tylko chciało ;-) po linkach widać też że to żadna nowość. To jest tak że większość zagranicznych uczelni reklamuje się udostępniając ciekawostki w internecie żeby przyciągnąć sponsorów, a w rzeczywistości na nowo odkrywają koło. Dla robotyki największym i najciekawszym problemem który trzeba rozwiązać to balans przy chodzeniu na dwóch nogach (najlepiej na siłownikach czy "mięśniach") przy większych prędkościach. Mówię o tym co jest ciekawe dla zwykłego zjadacza chleba, w końcu większości z nas marzy się taki robot na dwóch nogach ;]. Nie mniej ważne przełomy robotyki często nie są tak bardzo nagłaśniane i spektakularne ale po prostu wykorzystane do stworzenia np. takich nowoczesnych maszyn CNC, gdyby je nagłośnili zaraz Chińczycy staraliby się skopiować technologię ;-), a tak to najpierw kupią parę urządzeń ;-)
IrQ, 22 stycznia 2011, 21:38
a propos problemu który trzeba rozwiązać, on też jest już od kilku lat rozwiązany, niektóre roboty potrafią biegać na 2 nogach. Polecam filmik robota hondy:
maciejo, 22 stycznia 2011, 23:15
Rozwiązany ? Rozwiązanie raczkuje... Jeśli od wolnego chodu ten robot zacznie biegać podnosząc obie kończyny w powietrze i radzić sobie różnych warunkach (kąty nachylenia, powierzchnie, dodatkowe obciążenia, zdarzenia losowe) to wtedy mogę przyznać że problem jest rozwiązany ;] Krótko mówiąc chcemy robota sprawnego jak Sunny z filmu "Ja-robot". Fakt te roboty stają się już całkiem niezłe np:
Gogeton, 23 stycznia 2011, 00:16
Dla mnie fajna sprawa, ale raczej tylko ze względu na widzenie maszynowe. Chociaż jak mieli kamery rejestrujące tylko zmiany w obrazie to wystarczy detekcja linii prostych pewnie z paroma małymi dodatkami i gotowe
whiteresource, 23 stycznia 2011, 08:49
ok, przepraszam. tym razem to ja wyszedłem na forumowego trolla.
yaworski, 23 stycznia 2011, 14:26
@IrQ: żaden z przykładów, które podałeś nie wykorzystuje optyki. Wykorzystanie 3-osiowych akcelerometrów lub żyroskopów + wyliczanie delty nie jest rzeczywiście skomplikowane. Dane z tego typu czujników nie są tak zaśmiecone dodatkowymi danymi z tła jak w przypadku optyki (owszem, jest tam jakiś szum, ale są to dane, które można łatwo odfiltrować). Natomiast ustalanie położenia obiektu tylko i wyłącznie wykorzystując do tego obraz z kamery (lub dwóch) bez użycia dedykowanego tła (np typu blue lub green box) już nie jest tak proste.
A pomysł tych gości z artykułu chociaż prosty (kamery wykrywające zmiany czyli i ruch) jest jednak nowatorski i aż dziwne, że nie został wcześniej do czegoś takiego wykorzystany. W końcu oko działa na podobnej zasadzie.
waldi888231200, 23 stycznia 2011, 15:43
Człowiek niosący rozłozoną drabinę, narciarz.
Jajcenty, 23 stycznia 2011, 18:52
Jeśli wolno mi zdemotywować to mój zarzut brzmi: ułatwili sobie sprawę dając kamery prostopadle. Ustawienie równolegle byłoby bardziej "człowiecze". Jak już pokonają ten problem to będę się domagał wirującego talerza na końcu ołówka lub dwóch ołówków jeden na drugim. Skoro już wpadłem w klimaty cyrkowe to stary żart ale chyba pasuje do dyskusji: Cyrkowiec stoi na głowie, na jednej nodze balansuje drabinę na drugiej ma piramidę krzeseł. Dodatkowo gra na skrzypcach. No co, jeden z widzów: No Kulka(*) to on nie jest...
lub dwóch ołówków jeden na drugim. Skoro już wpadłem w klimaty cyrkowe to stary żart ale chyba pasuje do dyskusji: Cyrkowiec stoi na głowie, na jednej nodze balansuje drabinę na drugiej ma piramidę krzeseł. Dodatkowo gra na skrzypcach. No co, jeden z widzów: No Kulka(*) to on nie jest...
Kulka - słynny polski skrzypak