
Na Georgia Tech testują robota do ubierania ludzi

Miliony ludzi na całym świecie z różnych powodów potrzebują pomocy w ubieraniu. Roboty mogłyby się sprawdzić przy tym zadaniu, na razie kłopotów przysparzają jednak skomplikowane ludzkie ciało i same ubrania. By sprostać zapotrzebowaniu, w Georgia Institute of Technology skonstruowano robota PR2, który w ciągu 1 dnia przeanalizował blisko 11 tys. symulacji ubierania człowieka i na tej podstawie "wyobraził sobie", co może czuć ubierana w szpitalną koszulę istota ludzka.
Maszyna nie polega na wzroku, ale na dotyku oraz siłach generowanych i odbieranych podczas przesuwania ubrania przez dłoń, łokieć i ramię człowieka.
Niektóre przeanalizowane symulacje ubierania przebiegały wzorcowo, inne były spektakularnymi porażkami - gdy koszula zahaczała się o dłoń lub łokieć, robot przykładał do ręki niebezpieczne siły.
Na podstawie tych przykładów sieć neuronowa PR2 nauczyła się szacować siły przykładane do człowieka.
Ludzie uczą się nowych umiejętności metodą prób i błędów. PR2 także daliśmy taką możliwość. Przeprowadzanie tysięcy prób na człowieku byłoby zarówno niebezpieczne, jak i żmudne. Za pomocą symulacji, w ciągu zaledwie jednego dnia, robot mógł się jednak swobodnie nauczyć, co człowiek czuje podczas ubierania - wyjaśnia doktorant Zackory Erickson.
Robot nauczył się także przewidywać konsekwencje ubierania w różny sposób. Wie, że o ile pewne ruchy naprężają tkaninę, o tyle inne pozwalają przesunąć koszulę gładko wzdłuż ludzkiej ręki. Maszyna wykorzystuje te przewidywania, by wybrać ruchy, które pozwolą bezproblemowo ubrać rękę.
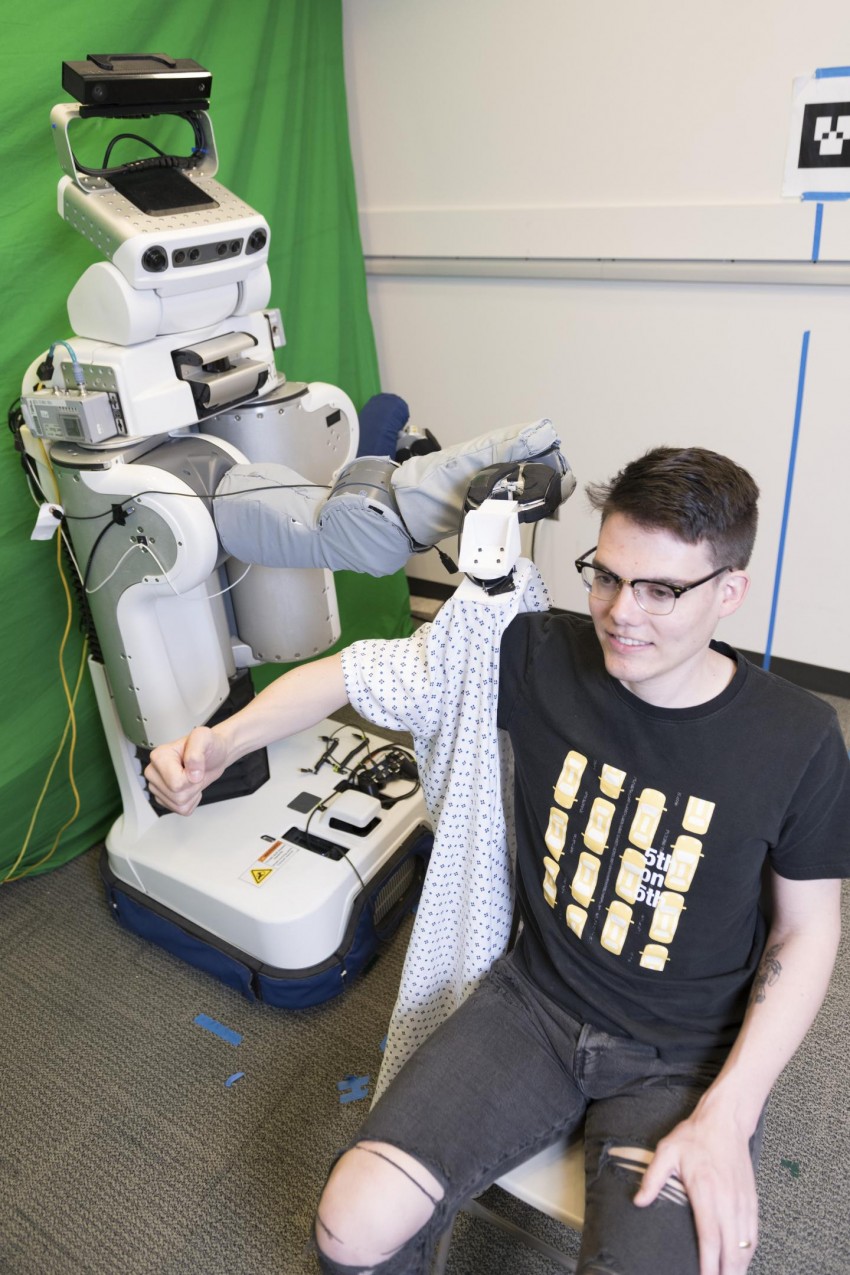
Po nauce na symulacjach przyszedł czas na ubieranie prawdziwych ludzi. Ochotnicy siadali naprzeciw robota i patrzyli, jak podnosił on koszulę i zaczynał ją wkładać na ich rękę.
Kluczem jest to, że robot zawsze myśli zawczasu. Pyta sam siebie, "czy jeśli włożę koszulę w ten sposób, na ramię człowieka zadziała większa, czy mniejsza siła? Co by się stało, gdybym to zrobił inaczej?" - opowiada prof. Charlie Kemp.
Naukowcy manipulowali czasowaniem robota i pozwolili mu planować przyszłe ruchy na 1/5 s do przodu. Nie schodzili poniżej tego czasu, bo zwiększało to wskaźnik błędów. Na razie robot ubiera tylko jedną rękę. Cały proces zajmuje mu ok. 10 sekund.

Komentarze (1)
Przemek Kobel, 16 maja 2018, 08:55
Miejmy nadzieję, że podczas trenowania jego AI nie pomylono "ubierania" z "zakładaniem".