
Miniaturowe roboty będą pływały w ludzkim organizmie. Dostarczą leki i przeprowadzą operację

Międzynarodowy zespół naukowy prowadzony przez doktora Olivera Schmidta z Uniwersytetu Technologicznego w Chemnitz pracuje nad miniaturowymi robotami, które można będzie wprowadzać do ludzkiego organizmu. Roboty miałyby przeprowadzać badania diagnostyczne i dokonywać interwencji chirurgicznych. Badania zostały opisane w artykule A flexible microsystem capable of controlled motion and actuation by wireless power transfer opublikowanym na łamach Nature Electronics.
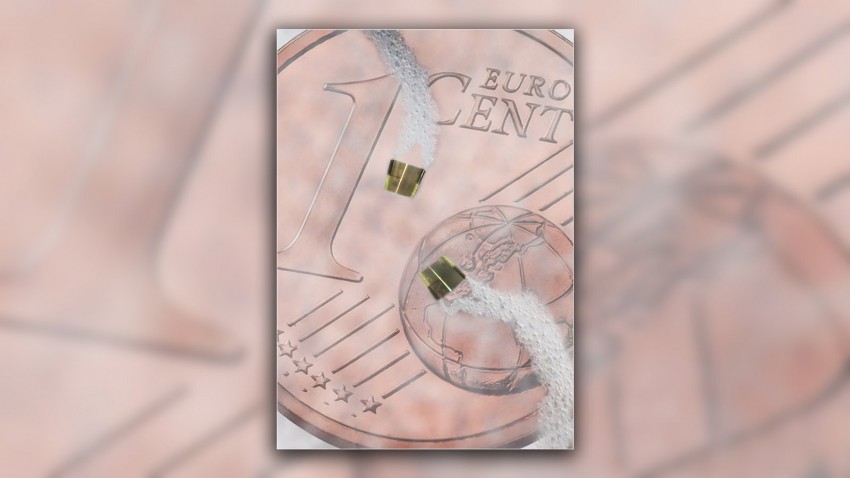
Niemal 10 lat temu zaczęliśmy rozwijać koncepcję niewielkich mikrorobotów, które byłyby napędzane potężnymi silnikami odrzutowymi i zawierałyby podzespoły mikroelektroniczne. Wyszliśmy od pomysłu budowy inteligentnego samonapędzającego się mikrosystemu, który wchodzi w interakcje z pojedynczą komórką biologiczną. Syste miałyby być wielkości podobnej do komórki. Zakładamy, że taki mikrorobot będzie zdolny po poruszania się, próbkowania środowiska, przenoszenia ładunków, dostarczania leków i przeprowadzania zabiegów mikrochirugicznych, mówi Schmidt.
System, który miałby pracować wewnątrz ludzkiego organizmu musi zawierać źródło energii elektrycznej, czujniki, aktuatory, anteny i obwody mikroelektroniczne.
Schmidt i jego zespół stworzyli niezwykle elastyczny mikrosystem łącząc elektroniczne podzespoły w skali mikro- i nano- na powierzchni chipa. Zasadniczą różnicą pomiędzy tym a innymi podzespołami elektronicznymi jest fakt, że urządzenie Schmidta wyposażono w silnik odrzutowy.
Sztuka polega na umieszczeniu na zastosowaniu zwiniętego w mikrotubie mocno naprężonego materiału, który jest mocowany z dwóch stron systemu już po zdjęciu go z podłoża. Mikrotuby są pokryte platyną. Gdy wchodzi ona w kontakt z roztworem zawierającym nieco nadtlenku wodoru dochodzi do reakcji, w wyniku której pojawiają się bąbelki tlenu. Bąbelki te są wyrzucane z mikrotub, napędzając cały system za pomocą odrzutu. Grup Schmidta już 12 lat temu wpadła na pomysł takiego napędu. Dopiero teraz udało się go stworzyć.
Reakcja, dzięki której działa cały napęd, może być kontrolowana za pomocą zmian temperatury miniaturowego silnika. Im jest ona wyższa, tym więcej bąbli powstaje i tym silniejszy jest odrzut. Naukowcy są w stanie kontrolować temperaturę obu silników niezależnie, dzięki czemu całym systemem można swobodnie sterować. Jest to możliwe dzięki temu, że do każdego z nich dołączony jest niewielki element, stawiający opór podczas przesyłania energii elektrycznej. Energię tę dostarcza się bezprzewodowo z zewnątrz. Jest ona odbierana przez niewielką antenę. System działa podobnie jak bezprzewodowe indukcyjne ładowanie telefonu komórkowego.
Skonstruowany przez Schmidta robot wyposażony został z niewielkie ramię, które może chwytać i wypuszczać obiekty znajdujące się w pobliżu. Również i ono jest sterowane za pomocą zmian temperatury.
Takie robotyczne ramię to również nowość w samonapędzających się mikrosystemach. Nasz mikrorobot może zostać wyposażony w niewielki LED pracujący w podczerwieni. Można go będzie wykorzystać do śledzenia urządzenia wewnątrz organizmu, mówi Schmidt.
Wykazaliśmy, że możliwe jest bezprzewodowe dostarczenie energii elektrycznej do ultramałych systemów robotycznych i że ta energia może posłużyć do przeprowadzenia użytecznych czynności, jak zdalne sterowania mikrorobotem, włączanie i wyłączanie LED. W następnym kroku naszych badań chcemy spowodować, by system działał w płynach ustrojowych, takich jak krew. W tym celu musimy nieco przebudować nasze silniki, dodaje uczony.


Komentarze (0)