
Sztuczna inteligencja pokonała mistrzów świata w pilotażu dronów

Gdy Deep Blue wygrał w szachy z Garri Kasparowem, a w 2016 roku AlphaGo pokonał w go Lee Sedola wiedzieliśmy, że jesteśmy świadkami ważnych wydarzeń. Były one kamieniami milowymi w rozwoju sztucznej inteligencji. Teraz system sztucznej inteligencji „Swift” stworzony na Uniwersytecie w Zurychu pokonał mistrzów świata w wyścigu dronów.

Swift stanął do rywalizacji z trzema światowej klasy zawodnikami w wyścigu, podczas którego zawodnicy mają założone na głowy specjalne wyświetlacze do których przekazywany jest obraz z kamery drona i pilotują drony lecące z prędkością przekraczającą 100 km/h.
Sport jest bardziej wymagający dla sztucznej inteligencji, gdyż jest mniej przewidywalny niż gra planszowa niż gra wideo. Nie mamy idealnej wiedzy o dronie i środowisku, zatem sztuczna inteligencja musi uczyć się podczas interakcji ze światem fizycznym, mówi Davide Scaramuzza z Robotik- und Wahrnehmungsgruppe na Uniwersytecie w Zurychu.
Jeszcze do niedawna autonomiczne drony potrzebowały nawet dwukrotnie więcej czasu by pokonać tor przeszkód, niż drony pilotowane przez ludzi. Lepiej radziły sobie jedynie w sytuacji, gdy były wspomagane zewnętrznym systemem naprowadzania, który precyzyjne kontrolował ich lot. Swift reaguje w czasie rzeczywistym na dane przekazywane przez kamerę, zatem działa podobnie jak ludzie. Zintegrowana jednostka inercyjna mierzy przyspieszenie i prędkość, a sztuczna sieć neuronowa, na podstawie obrazu z kamery lokalizuje położenie drona i wykrywa kolejne punkty toru przeszkód, przez które dron musi przelecieć. Dane z obu tych jednostek trafiają do jednostki centralnej – również sieci neuronowej – która decyduje o działaniach, jakie należy podjąć, by jak najszybciej pokonać tor przeszkód.
Swift był trenowany metodą prób i błędów w symulowanym środowisku. To pozwoliło na zaoszczędzenie fizycznych urządzeń, które ulegałyby uszkodzeniom, gdyby trening prowadzony był na prawdziwym torze. Po miesięcznym treningu Swift był gotowy do rywalizacji z ludźmi. Przeciwko niemu stanęli Alex Vanover, zwycięzca Drone Racing League z 2019 roku, Thomas Bitmatta lider klasyfikacji 2019 MultiGP Drone Racing oraz trzykroty mistrz Szwajcarii Marvin Schaepper.
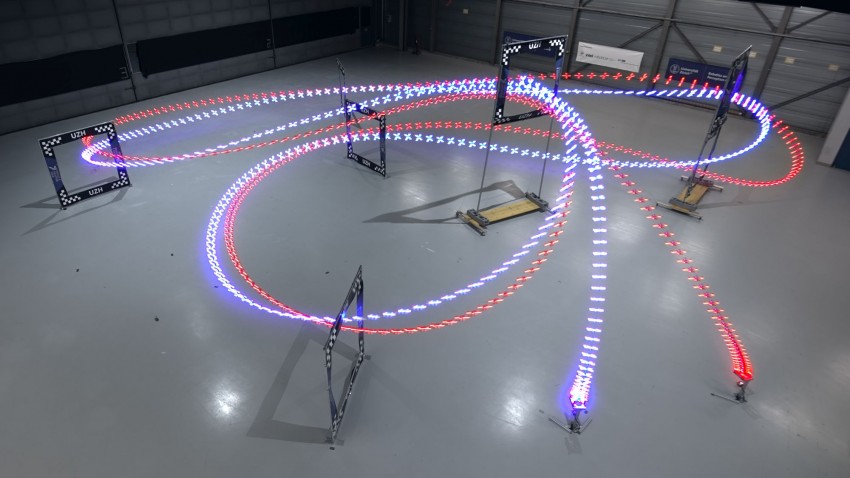
Seria wyścigów odbyła się w hangarze lotniska Dübendorf w pobliżu Zurychu. Tor ułożony był na powierzchni 25 na 25 metrów i składał się z 7 bramek, przez które należało przelecieć w odpowiedniej kolejności, by ukończyć wyścig. W międzyczasie należało wykonać złożone manewry, w tym wywrót, czyli wykonanie półbeczki (odwrócenie drona na plecy) i wyprowadzenie go półpętlą w dół do lotu normalnego.
Dron kontrolowany przez Swift pokonał swoje najlepsze okrążenie o pół sekundy szybciej, niż najszybszy z ludzi. Jednak z drugiej strony ludzie znacznie lepiej adaptowali się do warunków zewnętrznych. Swift miał problemy, gdy warunki oświetleniowe były inne niż te, w których trenował.
Można się zastanawiać, po co drony mają latać bardzo szybko i sprawnie manewrować. W końcu szybki lot wymaga większej ilości energii, więc taki dron krócej pozostanie w powietrzu. Jednak szybkość lotu i sprawne manewrowanie są niezwykle istotne przy monitorowaniu pożarów lasów, poszukiwaniu osób w płonących budynkach czy też kręcenia scen filmowych.
Warto tutaj przypomnieć, że systemy sztucznej inteligencji pokonały podczas symulowanych walk doświadczonego wykładowcę taktyki walki powietrznej oraz jednego z najlepszych amerykańskich pilotów.


Komentarze (2)
krzysztof B7QkDkW, 3 września 2023, 13:25
Ale to wszystko w kontrolowanych warunkach (że oświetlenie się zmieniało, betka). Jak zaczną latać na linii frontu przenosząc 100 gram C4 ... to wtedy będę się martwił.
ex nihilo, 5 września 2023, 04:37
Chcesz... to masz:
Przy okazji: "gramów"